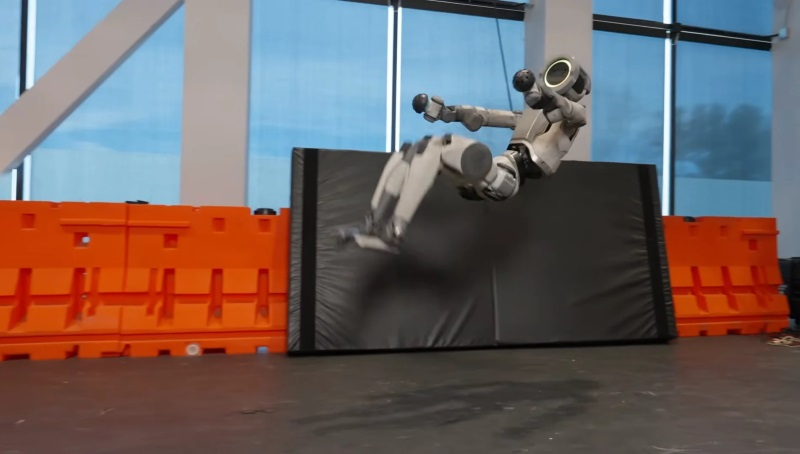
보스턴 다이내믹스는 로봇 아틀라스를 훈련시켜 뒤로 돌려서 플립(리버스 스프롤)을 수행하도록 했다
보스턴 다이나믹스가 아틀라스를 상업용으로 준비하는 과정: 연구소에서 산업 현장으로의 전환
최근 몇 주 동안 보스턴 다이나믹스는 인간형 로봇 아틀라스의 기능을 완전히 공개한 짧은 동영상을 여러 편 올렸다. 한 영상에서는 아틀라스가 가속하며 ‘휠‑바’를 수행하고 바로 뒤로 서보트(뒤집기)를 실행해 균형을 잃지 않고 다리 위에 착지한다. 이 영상은 빠르게 퍼졌고, 이후 회사는 더 긴 영상을 공개했다. 그 안에는 성공적인 복제 이전의 실패한 시도들이 담겨 있다.
새로운 영상에서 볼 수 있는 내용
* 슬로우 모션과 반복 시도 장면
* 로봇이 균형을 잃어 넘어지거나 머리 위에 착지하는 순간
* “마지막 돌진”이 상업용 버전으로 전환되기 전의 최종 시연이라는 코멘트
RAI와의 협력
최종 단계는 이전에 보스턴 다이나믹스로 알려졌던 로봇공학 및 인공지능 연구소(RAI)와 함께 진행됐다. 보스턴 다이나믹스 창업자 마크 라이버트가 이끌고 있다. 목표는 로봇의 이동성 한계와 제어 알고리즘을 검증하는 것.
RAI는 아틀라스 움직임을 관리하는 ‘물리적 AI’ 개발에 핵심 파트너이다. X(구 트위터)와 유튜브 게시물에서, CES 2026에서 보여진 기민한 묘기와 자연스러운 보행은 통합 학습 스킴의 결과라고 강조했다.
제로 전이 기술
팀은 시뮬레이션에서 물리 로봇으로 바로 모델을 옮길 수 있는 종합 학습 시스템을 사용했다. 이는 휴머노이드 로봇의 신뢰할 수 있고 범용적인 행동을 만드는 핵심 단계다.
연구소에서 생산 현장으로
현재 연구 버전 아틀라스는 화면에서 곡예를 선보이지만, 이미 공장 현장에서 작동하도록 준비 중이다. 생산 모델은 56개의 자유도와 촉각 센서가 있는 네 손가락 그리퍼를 갖출 예정이다.
현대자동차 그룹의 계획
현대자동차 그룹은 아틀라스 로봇이 2028년까지 조지아에 있는 공장에 통합될 것이라고 발표했다. 초기 단계에서는 부품 분류 작업을 수행하고, 2030년에는 다양한 부품 조립으로 기능을 확장할 계획이다.
따라서 보스턴 다이나믹스는 아틀라스를 연구소에서 실제 산업 환경으로 성공적으로 전환하며, 복잡한 알고리즘과 학습이 로봇을 신뢰할 수 있는 생산 현장 동료로 만들 수 있음을 보여준다
 Asted Cloud
Asted Cloud
댓글 (0)
의견을 남겨 주세요. 예의를 지키고 주제에서 벗어나지 말아 주세요.
댓글을 남기려면 로그인